Soubor:2006 Spejbl a.jpg
Skočit na navigaci
Skočit na vyhledávání
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Velikost tohoto náhledu: 450 × 600 pixelů. Jiné rozlišení: 600 × 800 pixelů.
{kind=link}
Původní soubor (600 × 800 pixelů, velikost souboru: 170 KB, MIME typ: image/jpeg)
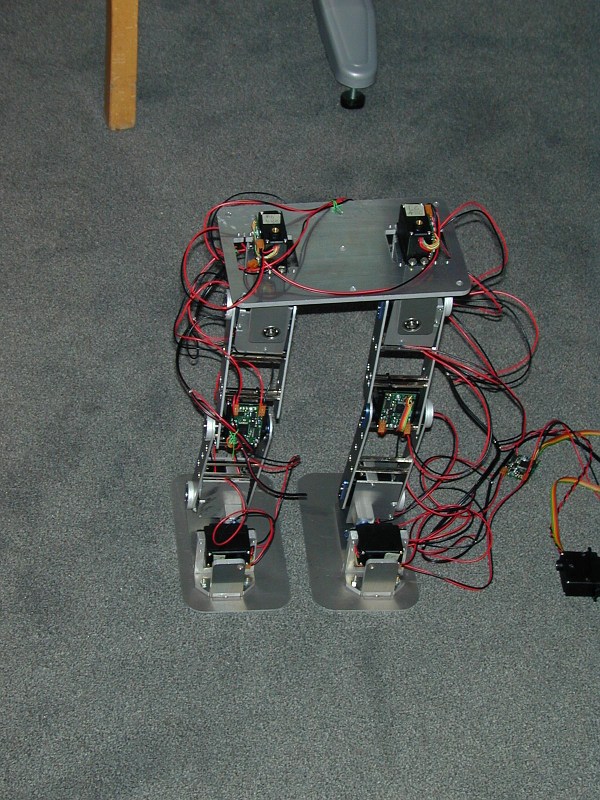
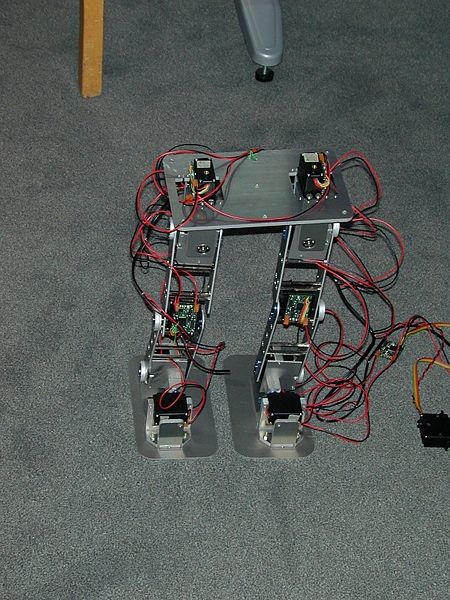
Robot úspěšně chodí statickou chůzí s pevnou trajektorií a místní zpětnou vazbou v osách kloubů. Cílem je tvorba a řízení dvounohého chodícího robota, navrženého jako rozšiřitelný a pružný systém, schopný sloužit studentům a výzkumníkům při zkoušení řídicích algoritmů
Historie souboru
Kliknutím na datum a čas se zobrazí tehdejší verze souboru.
| Datum a čas | Náhled | Rozměry | Uživatel | Komentář | |
|---|---|---|---|---|---|
| současná | 22. 8. 2008, 10:21 | | 600 × 800 (170 KB) | Komrska (diskuse | příspěvky) | Robot úspěšně chodí statickou chůzí s pevnou trajektorií a místní zpětnou vazbou v osách kloubů. Cílem je tvorba a řízení dvounohého chodícího robota, navrženého jako rozšiřitelný a pružný systém, schopný sloužit studentům a |
Tento soubor nemůžete přepsat.
Využití souboru
Tento soubor nepoužívá žádná stránka.
{kind=link}