Tepelná soustava T1
| Hlavní stránka | Laboratorní modely | Vyučované předměty | Vybavení | Historie | Správce laboratoře | Pro studenty | Odkazy | |
Laboratorní model Tepelná soustava T1 slouží k demonstraci, identifikaci a testování řídicích algoritmů pro soustavy s velmi dlouhými časovými konstantami. Typické aplikace jsou různé tepelné systémy, vytápěcí systémy, sklářské pece, kalcinační rotační pece apod. Fotografie modelu je na obr. 1.

Obrázek 1: Tepelná soustava T1

Schéma a konstrukce modelu
Tepelná soustava je tvořena dvěma relativně samostatnými systémy s různými časovými konstantami, které jsou představovány rezistory s odlišně provedenou izolací.Tyto rezistory jsou umístěny uprostřed chladičů pro procesory PC. Jejich teplota je měřena pomocí polovodičových prvků. Chladiče jsou připevněny na černé krabici, spolu s přepínačem pro výběr jedné ze dvou tepelných soustav a indikační dvoubarevné diody ukazující vybranou soustavu. V krabici je umístěno řízení a veškerá obslužná elektronika. Do čela krabice jsou vyvedeny ovládací prvky. V zadní části jsou konektory pro připojení vzdáleného řízení a napájení. Vzdálené řízení umožňuje připojení jak k počítači, tak i k průmyslovému řídicímu systému. Soustava je napájena ze stabilizovaného zdroje B2 – 23. Model se spouší páčkovým přepínačem na tomto zdroji. Detaily modelu jsou znázorněny na obr. 2, obr. 3 a obr. 4.

Obrázek 2: Pohled na model shora 
Obrázek 3: Zadní panel modelu


Informace pro studenty
Obecné informace
Model tepelné soustavy je možné ovládat ručně nebo vzdáleně - výběr způsobu řízení je volen z panelu současně s volbou typu vzdáleného řízení: PC, PLC nebo rezervní řízení. Situace je znázorněna na obr. 4.

Obrázek 4: Výběr způsobu řízení

Ruční řízení
V tomto režimu řízení je možné na panelu nastavit tepelný výkon a regulaci otáček větráku chlazení. Tepelný výkon se nastavuje spojitě otočným potenciometrem, otáčky se nastavují dvěma přepínači na čtyři různé rychlosti (viz obr. 6). Sepnutí přepínače je inicializováno rosvícenou diodou nad přepínačem. Ručně se nastavují otáčky větráku také při vzdáleném řízení z PC (Matlab). Teplotu soustavy je možné sledovat pouze na vzdáleném systému.
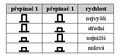
Obrázek 6: Nastavení rychlostí větráku

PC
Pro připojení modelu k PC je použita multifunkční měřící karta MF614. Model servomechanismu se řídí v programu Matlab/ Simulink s Real Time Toolboxem, kde jsou všechny veličiny převedeny na bezrozměrná čísla obvykle v intervalu (-1, +1).
PLC
Pro ovládání pomocí PLC je nutné nastavit potenciometr do polohy A-B. Soustava je připojena k automatu Allen–Bradley SLC 500.
Důležité vztahy
Při odvozování matematického popisu soustavy uvažujeme následující teploty: T1 [°] je teplota odporového drátu uvnitř rezistoru, T2 [°] je teplota na povrchu rezistoru, T3 [°] je teplota na senzoru, který snímá teplotu v místě mezi zdrojem tepla a okolím.
Pro jednoduchost neuvažujeme závislost odporu rezistoru na teplotě a rezistor lze tedy považovat za zdroj tepelného toku řízený napětím, zároveň uvažujeme konstantní hodnotu T3. Náhradní elektrické schéma je na následujícím obrázku.
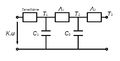
Obrázek 5: Náhradní elektrické schéma

Z tohoto schématu odvodíme stavové rovnice systému:
<math>\frac{\mathrm{d} T_1 (t)}{\mathrm{d}t}=\frac{K}{C_1}\,u(t)-T_1(t)\,\frac{\Lambda_1}{C_1}+T_2(t)\,\frac{\Lambda_1}{C_1}</math>, (1)
<math>\frac{\mathrm{d} T_2 (t)}{\mathrm{d}t}=T_1(t)\,\frac{\Lambda_1}{C_2}-T_2(t)\,\frac{\Lambda_1}{C_2}-T_2(t)\,\frac{\Lambda_2}{C_2}+T_3(t)\,\frac{\Lambda_2}{C_2}</math>, (2)
<math>y(t)\,=\,T_2 (t)</math>. (3)
Volba vstupních a výstupních veličin systému
Jako vstupní veličiny volíme příkon topného rezistoru a teplotu T3. Výstupní veličinou je teplota T2.
Soubory
- Média:T1-id.pdf - zadání pro identifikaci laboratorního modelu
- Média:T1-reg.pdf - zadání pro řízení laboratorního modelu
Literatura
1. FUKA, Jindřich; JOHN, Jan; KUTIL, Michal. Učebnice SARI [online]. Dostupné z WWW: <http://dce.felk.cvut.cz/sari>
2. VARGA, Rostislav. Identifikace a popis systému TEPLO. 2005/2006